(上篇)DSM-7疲勞駕駛預警系統的安裝位置推薦主要基于其圖像采集模塊需要時時刻刻監測到駕駛員面部的需求。以下是具體的安裝位置推薦:
一、主要安裝位置中控臺:中控臺是駕駛員視線范圍內的常見位置,便于安裝疲勞駕駛預警系統的圖像采集模塊。安裝在此處可以確保攝像頭能夠清晰地捕捉到駕駛員的面部特征。儀表盤:儀表盤也是駕駛員經常關注的位置,適合安裝疲勞駕駛預警系統。攝像頭可以隱藏在儀表盤內部或邊緣,以不干擾駕駛員視線為前提。左側A柱:左側A柱靠近駕駛員,是另一個可行的安裝位置。但需確保攝像頭不會阻擋駕駛員的視線或造成安全隱患。轉向柱后殼體:轉向柱后殼體同樣是一個可以考慮的安裝位置。但同樣需要注意不要干擾駕駛員的正常駕駛操作。頂棚組合開關:在一些車型中,頂棚組合開關附近也有足夠的空間來安裝疲勞駕駛預警系統。但這種安裝方式可能需要更多的安裝和調整工作,以確保攝像頭的角度和清晰度。
疲勞駕駛預警利用計算機視覺,OpenCV庫Haar特征分類器,級聯分類器或深度學習算法,對駕駛員面部實時檢測預警.福建新能源汽車疲勞駕駛預警系統
(上篇)MDVR(Mobile Digital Video Recorders,車載數字視頻錄像機)高清車載錄像機與疲勞駕駛預警設備的集成應用,是一個結合了音視頻監控、數據分析與預警提示的綜合性系統。以下是如何實現這種集成應用的具體步驟和優勢:
一、集成方案概述疲勞駕駛預警系統通過集成MDVR系統,結合先進的算法技術,實現對駕駛員疲勞狀態的實時監測與預警,并通過后臺遠程監控管理,確保行車安全。
二、系統架構與集成系統架構設計:疲勞駕駛預警系統架構設計包括數據采集層、數據處理層、數據分析層、預警提示層以及遠程監控管理層。各層之間通過統一的數據接口和通信協議實現無縫對接和協同工作,確保系統的穩定運行。
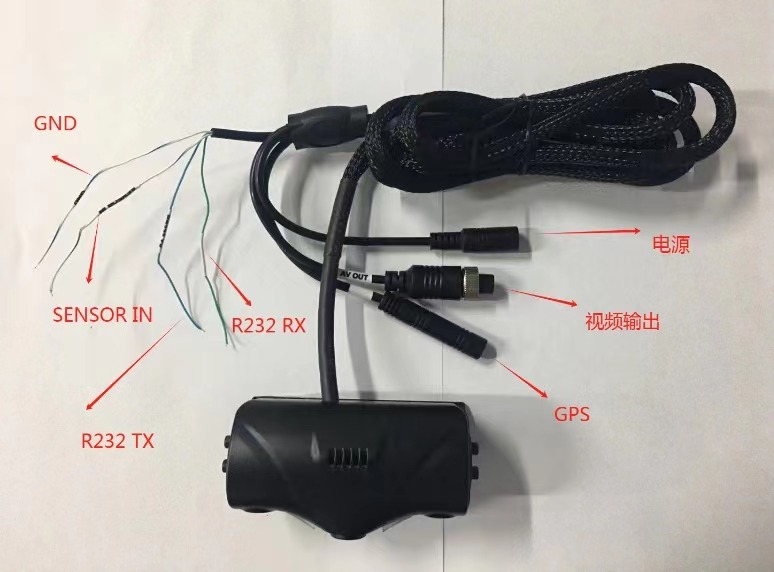
硬件集成:攝像頭與傳感器:安裝于車輛內部,用于捕捉駕駛員的面部特征、眼部信號、頭部運動等關鍵信息。MDVR系統:負責車輛內外的視頻錄制和存儲,同時支持GPS定位和無線通信功能,實現車輛位置的實時追蹤和數據的遠程傳輸。
算法集成:疲勞駕駛預警系統內置先進的神經網絡人工智能視覺算法,能夠實時分析駕駛員的臉部、眼部、體態等細節特征,準確識別疲勞駕駛行為。
中國澳門司機行為檢測預警系統的作用自帶算法的疲勞駕駛預警系統具有智能識別與分析,全天候工作能力,多功能預警和遠程監控與管理等主要特征.

(下篇)自帶算法識別與云端識別的司機疲勞駕駛預警系統各自具有獨特的應用區別與優勢,以下是對這兩者的詳細分析:
云端服務器具有強大的計算能力和存儲能力,能夠處理大量數據并快速做出決策。系統架構:系統包括前端采集設備(如攝像頭)、數據傳輸網絡和后端識別服務器等關鍵組件。前端設備負責數據采集,后端服務器負責數據處理和決策。由于數據存儲在云端,多個設備可以共享數據,實現協同工作和數據分析。云端服務器可以方便地更新和升級算法,提升識別精度和適應性。云端服務器具有強大的數據存儲能力,可以長期保存駕駛員的駕駛數據。這些數據可以用于后續的數據分析和研究。由于數據存儲在云端,系統可以與其他云端服務進行集成,實現跨平臺協同工作。例如,可以與車隊管理系統、智能駕駛輔助系統等集成,共同提升駕駛安全。通過云端計算資源,系統可以實現高效的算法處理和數據分析。
總結:自帶算法識別的系統具有實時性強、穩定性高、成本低和自主性強等特點;而云端識別的系統則具有算法更新方便、數據存儲能力強、跨平臺協同和資源利用率高等優勢。在選擇時,用戶應根據自身需求和場景特點進行權衡,選擇ZUI適合自己的系統方案。
(上篇)疲勞駕駛預警設備在商用車上的推薦安裝位置需要滿足能夠時時刻刻監測到駕駛員面部的條件,以確保設備能夠有效地捕捉到駕駛員的疲勞狀態。以下是一些推薦的安裝位置:
中控臺或儀表盤:這些位置通常位于駕駛員的正前方,且不會被方向盤或其他駕駛操作部件遮擋,便于設備捕捉駕駛員的面部圖像。同時,這些位置也便于駕駛員查看設備狀態或接收語音提示。左側A柱、儀表內部或轉向柱后殼體:這些位置同樣可以確保設備能夠監測到駕駛員的面部,且不會對駕駛員的視線或駕駛操作造成干擾。然而,需要注意的是,這些位置的安裝可能需要考慮設備的固定方式和穩固性,以確保設備在行駛過程中不會松動或移位。在安裝疲勞駕駛預警設備時, 車載疲勞駕駛預警系統集成MDVR實現云臺管理,其核XIN在于疲勞檢測算法,云臺控制邏輯和MDVR的高效集成.

(上篇)自帶算法的疲勞駕駛預警系統中,GPS的功能并不僅限于獲得車速信息,但確實在這一方面發揮著重要作用。以下是對GPS在疲勞駕駛預警系統中獲得車速信息功能的詳細闡述:
一、GPS獲取車速信息的基本原理GPS(全球定位系統)通過接收衛星信號來確定車輛的位置,并基于位置隨時間的變化來計算車速。具體來說,GPS系統會不斷記錄車輛在一定時間間隔內的位置坐標,然后通過計算這些位置坐標之間的直線距離和時間差,得出車輛的平均速度。這種方法雖然相對簡單,但在大多數情況下能夠提供較為準確的車速信息。
二、GPS在疲勞駕駛預警系統中的應用車速監測與預警:疲勞駕駛預警系統通常會根據車速來判斷駕駛員的疲勞程度。例如,當車速過高且持續時間較長時,系統會認為駕駛員可能處于疲勞狀態,從而發出預警。此時,GPS提供的車速信息就顯得尤為重要。行駛軌跡記錄:除了提供車速信息外,GPS還可以記錄車輛的行駛軌跡。這對于分析駕駛員的駕駛習慣、判斷駕駛員是否疲勞駕駛以及為事故調查提供線索等方面都具有重要意義。結合其他傳感器數據:在疲勞駕駛預警系統中,GPS通常會與其他傳感器(如加速度傳感器、方向盤傳感器等)結合使用,以提供更全MIAN、準確的駕駛員狀態信息。
疲勞狀態的判斷基于駕駛員的面部特征(眨眼頻率,閉眼時間,頭部運動),眼部信號,體態特征及車輛行駛狀態信息.廣東司機行為檢測預警系統設計文獻
疲勞駕駛預警系統基于圖像智能識別分析技術,實時檢測駕駛員的頭部及眼皮運動,凝視方向,打哈欠等狀態.福建新能源汽車疲勞駕駛預警系統
疲勞駕駛預警系統融合MDVR系統實現后臺遠程監控管理方式的具體闡述一:
一、系統架構與集成系統架構設計:疲勞駕駛預警系統和MDVR系統作為DL的子系統,在融合過程中需要設計合理的系統架構,確保兩者能夠無縫對接、協同工作。系統架構應包括數據采集層、數據處理層、數據分析層、預警提示層以及遠程監控管理層等。數據接口與協議:為了實現兩個系統之間的數據共享和交互,需要定義統一的數據接口和通信協議。這包括視頻數據的傳輸格式、疲勞狀態信息的編碼方式、數據包的封裝和解包規則等。集成開發:在系統設計完成后,需要進行集成開發。這包括編寫相應的軟件程序,實現數據的采集、處理、分析和傳輸功能。同時,還需要對硬件設備進行配置和調試,確保系統能夠穩定運行。
二、數據采集與傳輸數據采集:疲勞駕駛預警系統通過攝像頭和傳感器等設備實時采集駕駛員的面部特征、眼部信號、頭部運動等信息,并將這些信息傳輸至數據處理層。MDVR系統則負責錄制車輛內外的視頻畫面,并保存至存儲設備中。數據傳輸:采集到的數據需要通過無線網絡或有線網絡傳輸至遠程監控中心或云平臺。這要求系統具備穩定可靠的網絡通信能力,能夠確保數據的實時性和準確性。
請留意后續具體闡述二。 福建新能源汽車疲勞駕駛預警系統