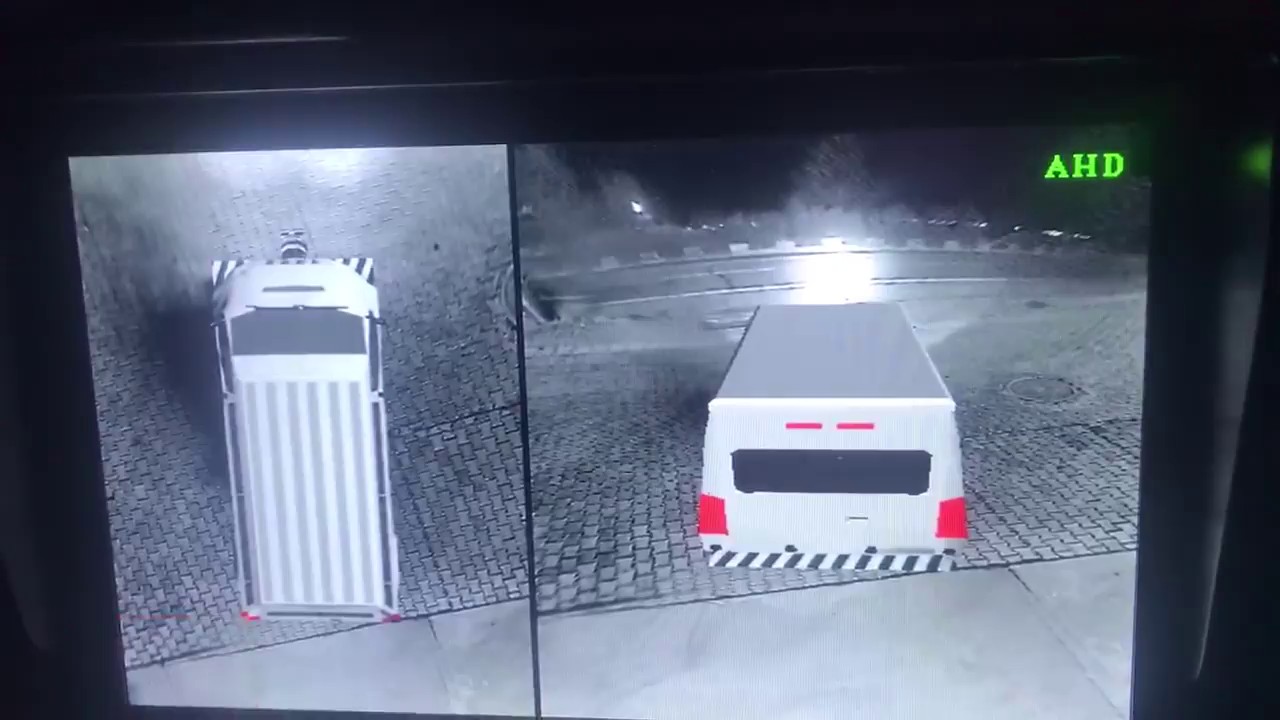
(上篇)360全景影像系統集成BSD盲區預警在公交車上的安裝應用,為公交車的行駛安全提供了有力保障。以下是對該系統在公交車上安裝應用的詳細分析:
一、系統組成與原理系統組成:360全景影像系統:由安裝在公交車前、后、左、右四個方向的高清攝像頭組成,通過圖像合成技術形成無死角的全景畫面。BSD盲區預警系統:通過安裝在車輛兩側的傳感器實時監測盲區內的隱患。工作原理:360全景影像系統:攝像頭捕捉公交車周圍的實時畫面,通過圖像拼接技術生成全景圖像,并顯示在駕駛室內的顯示屏上。BSD盲區預警系統:傳感器實時監測公交車盲區內的物體,當檢測到有物體進入盲區時,通過聲音或視覺信號提醒駕駛員。
二、安裝位置與要求攝像頭安裝位置:通常安裝在公交車的前部、后部、左側和右側,確保能夠捕捉到公交車周圍的全MIAN畫面。攝像頭應具有高清晰度、低畸變和寬視角等特點,以確保拍攝到的畫面清晰、準確。BSD傳感器安裝位置:安裝在公交車的兩側,通常位于后視鏡下方或附近,以便更好地監測盲區。傳感器應能夠準確識別并跟蹤盲區內的物體,確保預警系統的準確性。安裝要求:確保攝像頭和傳感器的安裝位置不會受到遮擋或干擾。攝像頭和傳感器的連接線應固定牢固。
瑞芯微RK3588適用高D車型全景影像系統,智能座艙,自動駕駛輔助系統,對高性能,高清晰度和復雜AI功能的需求.浙江吊車360全景影像系統
(中篇)AI360全景六路拼接與BSD盲區監測預警系統在壓路車上的應用,為工程車輛的安全運行提供了全新的解決方案。以下是對該系統在壓路車上應用的詳細闡述:
二、BSD盲區監測預警系統BSD盲區監測預警系統是車輛上的一項重要安全配置,它利用雷達傳感器或數字式紅外線攝像頭對車輛后方的視野盲區進行監測。當有車輛或行人靠近盲區時,系統會及時發出預警。工作原理:BSD盲區監測預警系統通過雷達傳感器或攝像頭實時監測壓路車后方的盲區情況。當有車輛或行人進入盲區時,系統會立即通過聲音、燈光等方式提醒駕駛員。預警功能:系統能夠精確識別潛在危險和障礙物,及時向駕駛員發出預警。這種技術的優勢在于其高準確性和快速反應能力,能夠有效降低事故發生的概率。兼容性:BSD盲區監測預警系統可以與AI360全景六路拼接系統無縫集成,形成一個完整的安全監測系統。這樣,駕駛員不僅可以通過全景圖像了解車輛周圍的環境,還能在盲區出現危險時及時獲得預警。
廣東裝載機360鳥瞰全景影像360全景影像支持RTSP(實時流傳輸協議)視頻流傳輸,實時視頻流的傳輸和控制,遠程監控和視頻數據的實時獲取.

(下篇)智慧云平臺AI360全景影像集成網口輸出及BSD盲區預警系統因其全M監控和實時預警的能力,被廣泛應用于多種工程機械作業場景中。以下是一些典型的應用場景:
這些系統能夠提供高清的全景畫面和實時的盲區預警信息,為無人駕駛系統提供準確的感知和決策依據,從而實現更加安全、高效的無人駕駛作業。
四、惡劣作業環境在一些惡劣的作業環境中,如礦山、港口等,工程機械常常需要在塵土飛揚、視線不佳的條件下作業。此時,360全景影像系統的高清夜視廣角攝像頭能夠穿透塵霧,提供清晰的畫面,而BSD盲區預警系統則能在復雜環境中實時監測并預警潛在的危險,確保作業安全。
綜上所述,智慧云平臺AI360全景影像集成網口輸出及BSD盲區預警系統因其全MIAN的監控能力和實時的預警功能,在復雜施工環境、大型基礎建設項目、無人駕駛技術升級以及惡劣作業環境等多種工程機械作業場景中都有著廣泛的應用。這些系統的應用不僅提高了工程機械的作業效率和安全性,也為智慧工地的建設提供了有力的技術支撐。
(上篇)顯控一體高度集成360全景影像及BSD盲區預警的主動安全一體機是一種先進的汽車安全輔助系統,它將360全景影像與BSD盲區預警功能高度集成于一體,為駕駛員提供了更為全MIAN、直觀且實時的車輛周圍環境信息,從而極大地提升了駕駛的安全性和便利性。以下是對這種一體機的詳細介紹:
一、系統組成與工作原理系統組成:該一體機主要由高清攝像頭、圖像處理單元、顯示屏、控制單元及報警裝置等組成。高清攝像頭通常安裝在車輛的前后左右四個方向,用于采集車輛周圍的圖像信息。圖像處理單元負責將采集到的多路視頻影像處理成一幅車輛周邊360度的車身俯視圖。顯示屏則用于顯示處理后的全景影像及BSD盲區預警信息。控制單元負責系統的整體運行與協調,而報警裝置則在檢測到潛在危險時發出警報。工作原理:當車輛行駛時,高清攝像頭會實時采集車輛周圍的圖像信息,并將這些信息傳輸給圖像處理單元。圖像處理單元利用先進的算法對采集到的圖像進行處理,生成車輛周邊360度的全景影像,并在顯示屏上顯示出來。同時,BSD盲區預警功能會利用圖像處理技術對實時視頻流進行分析,識別和跟蹤車輛周圍的行人、車輛或其他障礙物。 AVM系統利用4至6個廣角攝像頭,全方W覆蓋車輛周邊,實時采集多路視頻影像.

(上篇)觸控主動安全預警一體機系統360全景及BSD盲區預警在挖掘機上的應用,為挖掘機操作帶來了革MING性的安全性能提升。以下是對該系統應用的詳細闡述:
一、系統概述該系統集成了360全景監控、BSD盲區預警、觸控操作等先進技術,通過高清攝像頭、傳感器和智能算法,實時監測挖掘機周圍的環境,為駕駛員提供全方WEI、無死角的視野,并預警潛在的碰撞風險。
二、360全景監控攝像頭布置:在挖掘機的關鍵位置安裝多個高清攝像頭,如機身前后左右及頂部,確保360度無死角監控。圖像拼接:利用先進的圖像拼接技術,將多個攝像頭捕捉到的畫面實時拼接成一幅完整的全景圖像。觸控顯示:駕駛員通過觸控10寸顯示屏,可以直觀地查看挖掘機周圍的全景畫面,了解周圍環境的變化。
三、BSD盲區預警盲區監測:BSD盲區預警系統能夠實時監測挖掘機前后左右的盲區,這些區域通常是駕駛員視線范圍之外的地方。智能識別:利用AI算法對攝像頭捕捉到的圖像進行智能識別,能夠準確判斷盲區內的障礙物、行人或車輛等目標。多級預警:當系統檢測到盲區內有潛在碰撞風險時,會通過聲音、顏色提示、震動等多種方式向駕駛員發出預警,確保駕駛員能夠及時采取避讓措施。
工程車360全景影像系統通過4G網絡,可將車輛行駛數據,報警事件及錄像文件上傳至管理平臺.廣東裝載機360鳥瞰全景影像
全志T507適用于對成本敏感,對性能要求不高的入門級全景影像系統,經濟型車型后裝市場或簡單的安防監控場景.浙江吊車360全景影像系統
(上篇)4G360全景影像集成疲勞駕駛預警系統在壓路車上的安裝應用,為壓路車的駕駛安全性和運營效率帶來了明顯提升。以下是對該系統應用的具體分析:
一、4G360全景影像系統的應用消除視覺盲區通過在壓路車前后左右安裝高清廣角攝像頭,采集車身四周的高清實時畫面,并利用AI視覺拼接技術處理,形成車輛周邊全景視圖,實時顯示在駕駛員眼前。這極大地消除了壓路車行駛過程中的視覺盲區,提高了駕駛安全性。實時監測與預警系統具有BSD(盲區監測)功能,能實時監測車身四周盲區內的行人、非機動車輛和障礙物,實施分級預警。當檢測到潛在風險時,系統會通過車內屏幕與車外聲光報警器同時提醒司機和車輛周邊的作業人員,有效減少人車傷亡事故。遠程監控與管理借助4G后臺功能,礦場或施工場地管理人員可以遠程實時監控壓路車四周的影像,了解車輛當前的位置、行駛狀態以及周圍環境。這有助于實現對車輛的集中監控和調度,提高運營效率。
二、疲勞駕駛預警系統的應用實時監測駕駛員狀態疲勞駕駛預警系統基于先進的圖像智能識別分析技術,實時檢測駕駛員的頭部運動、眼皮運動、眼睛閉合頻率、凝視方向、打哈欠頻率等面部信息,監控駕駛員的疲勞狀態。 浙江吊車360全景影像系統