- 品牌
- 威睿晶科
- 型號
- 激光測距模塊
- 峰值波長
- 905
- 廠家
- 深圳市威睿晶科電子有限公司
- 產地
- 廣東,深圳
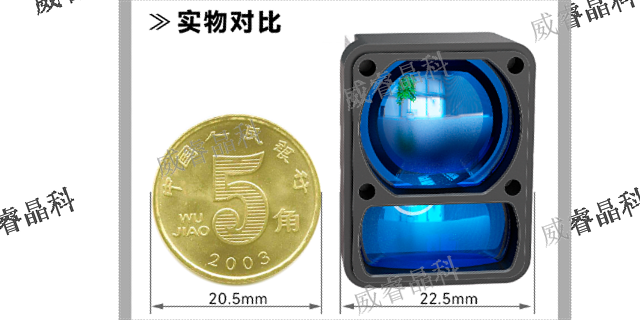
對無人駕駛技術的重要性:無人駕駛車輛依賴激光測距模塊來感知周圍環境。模塊通過發射和接收激光,實時測量與前車、行人及其他障礙物之間的距離,為車輛的自動駕駛系統提供關鍵數據。當檢測到與前車距離過近時,自動剎車系統可及時啟動,避免碰撞事故發生;在行駛過程中,依據激光測距模塊反饋的距離信息,車輛能保持安全車距,實現穩定、高效的行駛。激光測距模塊的高精度和快速響應特性,對于無人駕駛技術的安全性和可靠性至關重要,是推動無人駕駛技術不斷發展和完善的關鍵傳感器之一。1550nm波長激光測距模塊對人眼更安全,適合服務機器人應用。微型激光測距模塊測量
激光測距模塊的應用范圍在室內裝修領域也不斷拓展。在墻面平整度檢測方面,它能夠快速掃描墻面各個點的距離,通過數據分析得出墻面的平整度偏差,幫助裝修工人及時發現問題并進行修正。對于天花板吊頂的安裝高度確定,激光測距模塊可以提供準確的數值,確保吊頂安裝的水平度和高度一致性。此外,在家具定制過程中,它可用于測量房間的尺寸和空間布局,以便設計師根據實際空間大小設計出合適的家具尺寸和擺放方案,提高空間利用率和裝修效果。長距離激光測距模塊盲區抗干擾能力強,適應復雜環境。

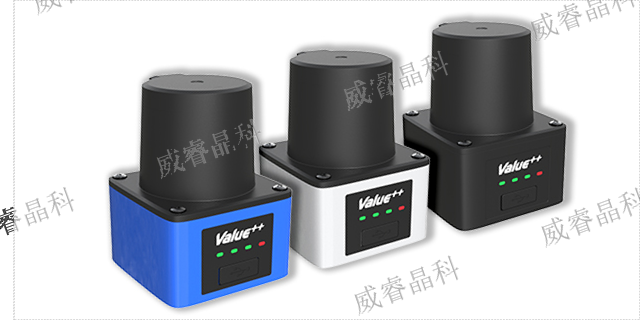
在智能家居系統中,激光測距模塊為用戶帶來全新體驗。掃地機器人內置激光測距模塊,可實時掃描房間布局,構建精細的二維或三維地圖,規劃極好清掃路徑,避免碰撞家具和障礙物。智能窗簾系統利用激光測距感知窗戶大小和障礙物位置,自動調節窗簾開合程度。此外,在家庭安防領域,激光測距模塊可監測門窗開啟狀態,一旦檢測到異常距離變化,立即觸發報警,為家庭安全提供保障。
激光測距模塊在復雜環境下的抗干擾能力至關重要。為應對環境光干擾,模塊采用濾光片和特定波長激光,只接收特定頻率的反射光,有效抑制背景光影響。針對多路徑反射干擾,通過算法優化,分析反射光的強度、時間等信息,識別真實目標反射信號。在強電磁環境中,模塊采用屏蔽設計和抗干擾電路,確保內部電路穩定運行,從而在各種惡劣環境下保持高精度測量性能。
要提高激光測距模塊的測量精度,可以從以下幾個方面進行考慮和優化:
選擇合適的激光源:激光源的波長、功率和重復頻率等參數會直接影響測距精度。選擇波長適中、功率穩定且重復頻率適當的激光源,以提高信號的穿透力和抗干擾能力。例如,對于某些應用,短波長激光可能更適合,因為它對不同物體的反射能力不同,有助于減少誤差。
優化接收器性能:提高接收器的靈敏度和響應時間,以更準確地檢測反射回來的激光脈沖。高靈敏度和快速響應的接收器能夠捕獲更微弱的信號,減少測量誤差。確保接收器對特定波長激光的響應佳,以減少非目標激光的干擾。
精確測量飛行時間:提高激光脈沖飛行時間的測量精度。這通常可以通過使用更高頻率的時鐘脈沖來實現,因為時鐘脈沖頻率越高,時間間隔的精確測定越有意義。例如,當使用高頻率的時鐘脈沖時,如,可以顯著提高測距精度。
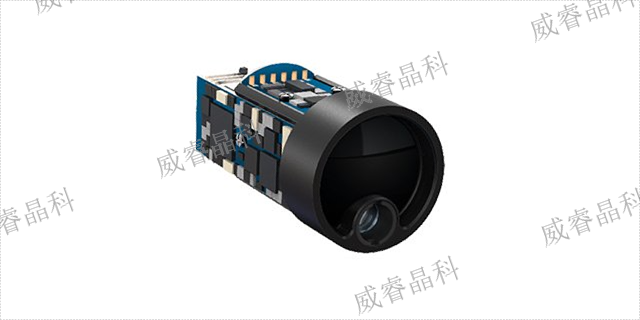
減少環境干擾:在測量過程中,避免或減少環境光、雜散信號等噪音的干擾。采用合適的濾波算法和數據處理方法,以濾除噪音,提高測量的精確性和穩定性。選擇合適的測量角度和工作環境,以減少強光、反光物體等對測量結果的干擾。優化安裝位置和角度:確保激光測距模塊在安裝時與需要測量的物體處于同一水平線上。 模塊體積小,便于集成到智能設備。

為推動激光測距模塊的廣泛應用,成本控制是關鍵。一方面,通過規模化生產降低單個模塊成本,隨著市場需求增長,生產線自動化程度提高,生產效率提升,分攤研發和設備成本。另一方面,優化原材料選擇,采用性價比更高的元器件,同時簡化生產工藝,減少不必要的生產環節。此外,企業通過技術創新,提高產品集成度,降低生產成本,使激光測距模塊在更多領域實現經濟可行的應用。
將激光測距模塊與其他傳感器融合,可提升系統功能和性能。與視覺傳感器結合,激光測距提供精確距離信息,視覺傳感器獲取目標物體的外觀特征,二者互補,實現對目標的精細識別和定位,應用于智能交通中的車輛檢測與跟蹤。與慣性傳感器融合,在動態環境下,慣性傳感器補償激光測距模塊因運動產生的誤差,保證測量準確性,常用于自動駕駛汽車的環境感知系統。 激光測距模塊在設計時充分考慮了低功耗的需求,確保了模塊的長壽命運行。長距離激光測距模塊盲區
采用安全激光,符合人眼防護標準。微型激光測距模塊測量
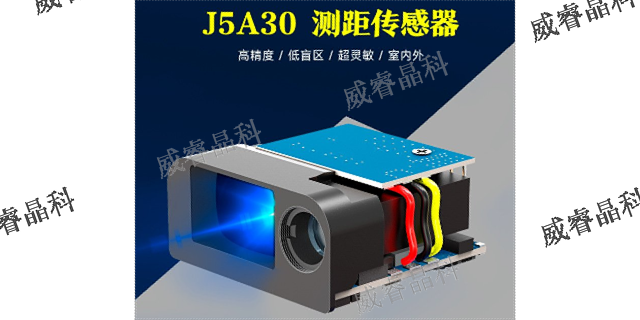
激光測距模塊基礎原理:激光測距模塊主要基于飛行時間(ToF)原理工作。其發射不可見的激光脈沖,當激光脈沖遇到目標物體后會反射回來,模塊通過準確測量激光從發射到接收的時間差,再結合光速,就能快速且準確地計算出目標物體與模塊之間的距離。比如 VL53L0X 激光測距傳感器模塊,它就是利用這一原理,通過發射和接收激光脈沖,實現對距離的測量。這種基于 ToF 技術的測量方式,相較于傳統光學三角測量方法,具有更高的精度和穩定性,能夠適應多種復雜環境下的測距需求,為眾多依賴精確距離數據的應用場景奠定了基礎。微型激光測距模塊測量
- 威睿晶科激光測距模塊測量 2025-07-09
- 國內激光測距模塊定位 2025-07-09
- 高頻率激光測距模塊要多少錢 2025-07-09
- 4km激光測距模塊盲區 2025-07-09
- 廣東國產激光測距模塊 2025-07-09
- 工業級激光測距模塊多少錢一臺 2025-07-09
- 相位激光測距模塊價錢 2025-07-09
- 鄭州毫米級激光測距模塊 2025-07-09