- 品牌
- 威睿晶科
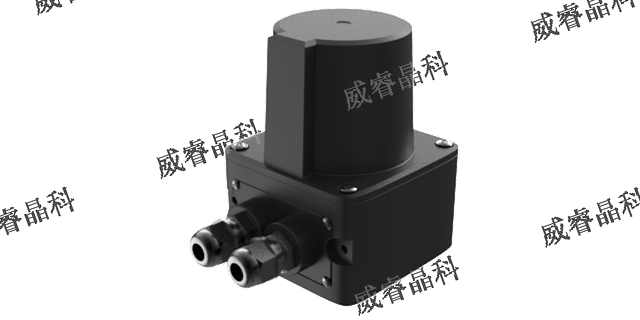
- 型號
- J5R
- 加工定制
- 是
- 精確度
- 1~5cm
- 工作溫度
- -10~50(典型值)
- 峰值波長
- 905
- 工作電壓
- DC 9~36(典型值)
- 是否進口
- 是
- 廠家
- 深圳市威睿晶科電子有限公司
- 產地
- 廣東,深圳,北京,上海,浙江,湖北
- 量程(m)90%目標發射
- 0.1~30
- 掃描范圍
- 270°
- 測量頻率(khz)
- 10~50
隨著物流行業的快速發展,自動引導車(AGV)已成為現代物流系統的重要組成部分。然而,在AGV的運行過程中,如何有效地避免與其他AGV或障礙物的碰撞是一個關鍵問題。激光雷達作為一種高精度、高效率的傳感器,在AGV防撞預警系統中發揮著越來越重要的作用。激光雷達的工作原理是基于激光測距和速度檢測。它通過發射激光束并接收反射回來的信號,計算出目標物體的距離和速度信息。在此基礎上,AGV可以實時感知周圍環境的變化,從而有效地避免與其他AGV或障礙物的碰撞。在AGV防撞預警系統中,激光雷達的應用場景非常廣。例如,在倉儲物流中心,AGV可以利用激光雷達進行路徑規劃和避障;在生產線上,AGV可以通過激光雷達與協作機器人進行協同作業,提高生產效率。激光雷達在AGV防撞預警系統中的優勢在于其高精度和高效率,可以降低AGV碰撞事故的發生率,提高整個物流系統的運行效率。以一個實際案例為例,某大型電商企業采用激光雷達防撞預警系統,實現了AGV在倉儲物流中心的高效運行。該系統的實施不僅顯著提高了倉儲物流中心的貨物處理能力,還降低了由于AGV碰撞導致的人員傷亡和財產損失。激光雷達可以用于AGV的避障和防撞功能,有效避免車輛在運行過程中與障礙物發生碰撞。寧波激光雷達
激光雷達
激光雷達是什么?激光雷達(英文:LaserRadar),是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟蹤和識別。它由激光發射機、光學接收機和信息處理系統等組成,激光器將電脈沖變成光脈沖發射出去,光接收機再把從目標反射回來的光脈沖還原成電脈沖,送到顯示器。激光雷達擁有分辨率高、隱蔽性好和抗有源干擾能力強等優點。其中,距離和速度分辨率高,意味著可以利用距離——多譜勒成像技術來獲得目標的清晰圖像,這也是激光雷達的優點,多數應用都是基于此。另外,激光直線傳播、方向性好、光束非常窄,只有在其傳播路徑上才能接收到,因此他人截獲非常困難,且激光雷達的發射系統(發射望遠鏡)口徑很小,可接收區域窄,有意發射的激光干擾信號進入接收機的概率極低;另外,自然界中能對激光雷達起干擾作用的信號源不多,因此激光雷達抗有源干擾的能力很強。三維激光雷達服務熱線掃地機器人使用激光雷達技術可以更容易地避免碰撞和障礙物,提高工作效率和安全性。
基于激光雷達的無人駕駛叉車的設計與應用:隨著工業自動化和智能化發展,無人駕駛叉車技術受到了關注。無人駕駛叉車能夠提高物流效率,降低人工成本,避免人為錯誤,已成為未來物流領域的重要發展方向。本文將從基于激光雷達的無人駕駛叉車技術的設計與應用方面進行詳細闡述。無人駕駛叉車技術的應用背景,叉車是現代物流系統中不可或缺的重要設備,應用于倉庫、工廠、港口等場所。然而,傳統的叉車操作需要人工駕駛,存在很多問題。首先,人工駕駛叉車效率低下,容易受到人體疲勞和精神狀態的影響。其次,人工駕駛叉車容易發生安全事故,給企業和員工帶來巨大損失。因此,研發無人駕駛叉車技術成為當務之急。激光雷達在無人駕駛叉車中的應用,激光雷達是一種高精度、高效率的傳感器,能夠獲取目標物體的距離、方位角、高度等信息。在無人駕駛叉車中,激光雷達被應用于定位、導航、避障等方面。首先,激光雷達可以通過對周圍環境的掃描,獲取叉車的3D點云數據,從而進行精確定位和導航。其次,激光雷達可以利用獲取的數據進行路徑規劃,避免叉車與其他物體發生碰撞。激光雷達還可以實時檢測周圍環境的變化,及時調整叉車的運行狀態,保證其穩定性和安全性。
激光雷達在地質災害預警中的測量和探測應用隨著科技的不斷發展,地質災害預警領域正在逐步引入激光雷達(LIDAR)技術,以提高災害預警的準確性和及時性。激光雷達作為一種先進的測量技術,具有測量速度快、精度高、范圍廣等優勢,為地質災害預警提供了強有力的支持。激光雷達的測量原理主要是通過發射激光束,并接收目標物體反射回來的信號,根據激光傳播的時間和速度,計算出目標物體的距離、速度、角度等信息。在地質災害預警中,激光雷達可以對地質表面進行高精度測量,獲取地形地貌信息,進而預測地質災害發生的可能性。激光雷達在地質災害預警中具有廣泛的應用場景。例如,在地震預警中,激光雷達可以通過對地殼運動的監測,提供高精度的地震參數,為地震預警系統提供可靠的數據支持。在山體滑坡和泥石流預警中,激光雷達可以獲取高精度的地形數據,通過分析這些數據,可以判斷出是否存在山體滑坡或泥石流的風險。以一個實際案例為例,某地在山體滑坡和泥石流預警中引入了激光雷達技術。通過激光雷達對山體的持續監測,獲取了大量地形數據。經過對這些數據的分析,科學家們成功預測了一場山體滑坡和泥石流災害的發生,為當地居民和消防人員提供了寶貴的預警信息。AGV 需要進行高難度的作業時,激光雷達可以幫助 AGV 的手臂更精確地動作。
激光雷達驅動的全自動掃地機器人:帶領智能家居清潔新時代。隨著科技的發展,激光雷達驅動的全自動掃地機器人正帶領著智能家居清潔的新時代。這些機器人利用激光雷達技術實現精確的環境感知和智能路徑規劃,為用戶提供高效、便捷的清潔體驗。激光雷達作為主要技術之一,通過發射激光束并測量其反射信號,能夠準確感知周圍環境中的物體和距離。機器人利用激光雷達獲取的數據構建地圖,并根據障礙物信息進行智能路徑規劃。這種先進技術使得機器人能夠避開家具、墻壁等障礙物,高效清潔每個角落。激光雷達驅動的全自動掃地機器人還具備智能學習和自適應能力。通過深度學習和人工智能算法,機器人能夠根據用戶的需求和環境變化,自主調整清潔策略和工作模式,提高清潔效果。這種自適應性使得機器人能夠在不同地板類型和清潔場景下表現出色。另外,激光雷達驅動的機器人還具備智能避障技術。利用激光雷達提供的精確地圖和障礙物信息,機器人能夠快速響應并規避家具、電線等障礙物,從而降低碰撞和卡住的風險。用戶可以放心使用機器人,無需擔心安全問題。激光雷達的精確導航讓掃地機器人成為智能家居的理想選擇,太神奇了!浙江二維激光雷達
激光雷達可以幫助車輛在行駛中避免碰撞和障礙物。寧波激光雷達
激光雷達是什么?激光雷達(LIDAR)是一種傳感器技術,利用激光束來測量物體與雷達之間的距離,并生成高精度的地圖或環境模型。它通過發射短脈沖的激光光束,然后測量從目標物體反射回來的光的時間延遲來確定距離。激光雷達通常由以下組件組成:激光發射器、接收器、時鐘、幕板、旋轉掃描器和控制電子設備。激光發射器會發出幾納秒至幾微秒的超短脈沖激光光束,將其指向目標物體。當激光束擊中目標并被反射回來時,接收器會記錄下光的時間延遲。根據光在空氣中的傳播速度,可以通過計算時間延遲來得知目標物體與激光雷達之間的距離。為了獲取整個周圍環境的三維點云數據,激光雷達通常配備一個旋轉掃描器。這個掃描器會以高速旋轉并在水平和垂直方向上進行掃描,使激光束可以覆蓋整個環境。通過掃描的過程,激光雷達會獲取到大量離散的點云數據,每個點都包含了該點的三維坐標和反射強度信息。利用這些點云數據,可以創建高精度的地圖或環境模型。激光雷達能夠提供精確測量、高分辨率以及在不同光照條件下的穩定性。因此,它被廣泛應用于自動駕駛車輛、機器人導航、航空測繪、建筑物信息模型等領域,為實現精確感知和定位提供重要支持。寧波激光雷達

- 二維激光雷達芯片 2025-07-14
- 毫米波激光雷達哪里有 2025-07-14
- 3D激光雷達廠家 2025-07-14
- 長距離激光雷達哪里有 2025-07-14
- 無人機激光雷達多少錢一臺 2025-07-14
- 2D激光雷達廠家 2025-07-14
- 機器人激光雷達芯片 2025-07-13
- 三維激光雷達數據 2025-07-13