焊接培訓(xùn)行業(yè)狀況焊接是一項對過程要求很高的工作,在現(xiàn)有的手工焊接生產(chǎn)中,通常采用MAG/MIG焊接的約占50%,TIG焊接約占30%,MMA焊接約占20%;如:在造船行業(yè)中,MAG約占70%,MMA約占30%;那么,這就需要焊工要有扎實的操作手法、規(guī)范的動作。而在焊接培訓(xùn)過程中傳統(tǒng)方式存在以下多種問...
機器人焊接工作站實訓(xùn)平臺基本參數(shù)
- 品牌
- HOJOLO,LEAKSHOOTER,VALENIAN,VA
- 型號
- VT-ZP170
- 類型
- 機器智能化
- 加工定制
- 是
- 用途
- 教學(xué)實訓(xùn)
- 電機功率
- 20
- 外形尺寸
- 1900x1000x1200
- 重量
- 10
- 產(chǎn)地
- 昆山
- 廠家
- 漢吉龍測控技術(shù)有限公司
機器人焊接工作站實訓(xùn)平臺企業(yè)商機
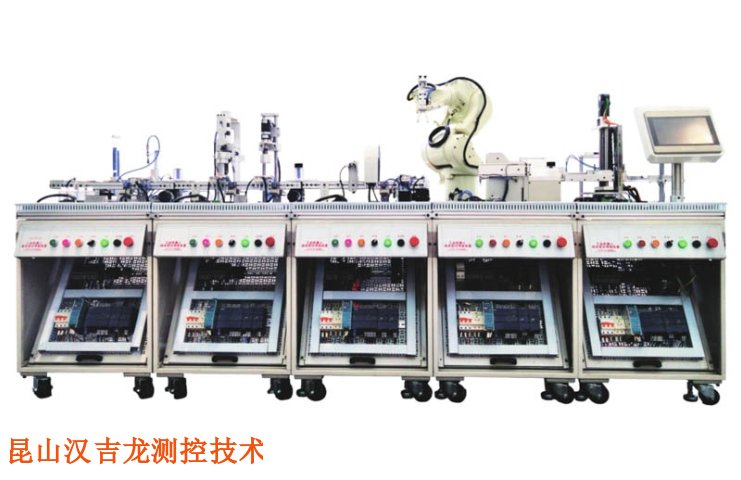
?機器人焊接工作站實訓(xùn)平臺相對容易操作?。機器人焊接工作站實訓(xùn)平臺通常采用模塊化設(shè)計,主要由焊接機器人、焊接系統(tǒng)、系統(tǒng)、安全光幕及操控系統(tǒng)等組成?1。這種設(shè)計使得平臺結(jié)構(gòu)清晰,操作簡便。此外,機器人焊接工作站實訓(xùn)平臺還具備以下特點:?模塊化設(shè)計?:平臺按照模塊化結(jié)構(gòu)進行設(shè)計,方便學(xué)生進行專項實訓(xùn)教學(xué)和維護維修?2。?多功能性?:平臺可以進行工業(yè)機器人相關(guān)技術(shù)開發(fā)、維護維修、示教等方面的實訓(xùn)教學(xué),還可以進行多種類工業(yè)機器人與機床、自動輸送線集成應(yīng)用的實訓(xùn)?2。?高精度和高適應(yīng)性?:通過拖拽示教、電弧、激光視覺等技術(shù),平臺能夠?qū)崿F(xiàn)穩(wěn)定易用、智能的焊接操作?3。這些特點使得機器人焊接工作站實訓(xùn)平臺在操作上相對簡單,適合學(xué)生進行學(xué)習(xí)和實踐。利用機器人焊接實訓(xùn)平臺學(xué)習(xí)焊接工藝。新一代機器人焊接工作站實訓(xùn)平臺怎么做

機器人焊接工作站實訓(xùn)平臺的安全防護系統(tǒng)的日常檢查涵蓋硬件設(shè)備、軟件系統(tǒng)及運行環(huán)境等多個方面,以下是具體的檢查內(nèi)容和方法:物理隔離與機械部件檢查安全圍欄:查看圍欄有無變形、損壞、松動的情況,圍欄的高度和間距是否符合安全標(biāo)準(zhǔn),固定螺栓等連接件有無缺失或銹蝕。防護門:檢查防護門開關(guān)是否順暢,門鎖能否正常工作,門關(guān)閉時是否密封良好,與機器人系統(tǒng)的聯(lián)鎖功能是否正常,即開門時機器人是否能立即停止運行。機械部件:對安全防護系統(tǒng)中的其他機械部件,如防護欄的支架、防護門的合頁等,檢查其是否有磨損、變形、裂縫等問題,確保其結(jié)構(gòu)強度和穩(wěn)定性。傳感器及信號系統(tǒng)檢查安全光幕:檢查光幕表面是否清潔,有無灰塵、污漬或損壞,通過遮擋光幕的不同位置,觀察機器人是否能及時停止運行。 漢吉龍機器人焊接工作站實訓(xùn)平臺加工機器人焊接工作站實訓(xùn)平臺可助力突破焊接效率瓶頸嗎?

VALENIAN在技術(shù)革新層面,人工智能與機器人焊接工作站的融合正帶來質(zhì)的飛躍。AI算法能實時分析焊接過程中的數(shù)據(jù),自動調(diào)整參數(shù),實現(xiàn)自適應(yīng)焊接,進一步提升焊接質(zhì)量穩(wěn)定性。同時,5G技術(shù)讓遠程操控與監(jiān)控成為現(xiàn)實,**可遠程指導(dǎo),突破地域限制,優(yōu)化生產(chǎn)流程。再從市場趨勢角度,勞動力成本上升、招工難問題日益凸顯,促使企業(yè)加速自動化轉(zhuǎn)型,機器人焊接工作站成為****。環(huán)保要求趨嚴(yán),其相較于傳統(tǒng)焊接,能更好控制污染物排放,契合綠色制造理念。綜上,機器人焊接工作站憑借技術(shù)優(yōu)勢、市場需求與政策導(dǎo)向,在未來制造業(yè)發(fā)展中,定將占據(jù)**地位,前景無限光明。
依靠機器人焊接工作站實訓(xùn)平臺在一定程度上有助于攻克高難度焊接任務(wù),但也存在一些局限性,具體分析如下:有助于攻克的方面模擬真實環(huán)境與操作熟悉設(shè)備與工藝:實訓(xùn)平臺能模擬真實的機器人焊接工作場景,讓操作人員熟悉焊接機器人的操作界面、編程方法以及各種焊接參數(shù)的設(shè)置,為在實際中操作高難度焊接任務(wù)的設(shè)備打下基礎(chǔ)。例如FANUC機器人焊接工作站實訓(xùn)平臺,可讓學(xué)員深入了解機器人的運動和焊接流程。工藝參數(shù)調(diào)試模擬:通過實訓(xùn)平臺可以反復(fù)調(diào)試焊接電流、電壓、焊接速度、擺動頻率等參數(shù),找到適合高難度焊接任務(wù)的比較好參數(shù)組合。以不銹鋼厚板焊接為例,可在實訓(xùn)平臺上不斷嘗試不同參數(shù),觀察焊縫成型和質(zhì)量,為實際操作積累經(jīng)驗。提升人員技能與素質(zhì)提升操作技能:操作人員能在實訓(xùn)平臺上進行大量練習(xí),提升對焊接軌跡的精度和對復(fù)雜焊縫的能力,從而在面對高難度焊接任務(wù)時,能夠更熟練地操作機器人完成任務(wù)。比如進行曲線焊縫或空間不規(guī)則焊縫焊接練習(xí),可提高操作人員對復(fù)雜路徑的編程和操作能力。培養(yǎng)故障處理能力:實訓(xùn)平臺可設(shè)置各種故障場景,讓操作人員學(xué)習(xí)如何診斷和排除焊接過程中可能出現(xiàn)的故障,如焊接缺陷、設(shè)備故障等。 機器人焊接工作站實訓(xùn)平臺,能適應(yīng)不同焊接材料?

工業(yè)機器人焊接工作站”主要由焊接機器人、焊接系統(tǒng)、安全光幕及操控系統(tǒng)等組成,使學(xué)生有機會學(xué)習(xí)焊接機器人操作知識,豐富和完善焊接機器人的教學(xué)資源,使學(xué)生具備從事焊接的機器人焊接技能人員和中專門人才所必需的基本知識和基本技能,以適應(yīng)焊接自動化技術(shù)應(yīng)用領(lǐng)域日新月異的發(fā)展需要。實訓(xùn)任務(wù):1.焊接系統(tǒng)實驗實驗1.焊機及焊接的認知實驗、機器人系統(tǒng)實驗實驗1.機器人認知實驗2.機器人坐標(biāo)系及運動軌跡實驗3.機器人基本指令實驗4.機器人編程及運動方式3、機器人焊接整套系統(tǒng)實驗實驗1.機器人搭配焊接認知實驗2.機器人與焊機搭配焊接實驗3.機器人焊接直線件實驗4.機器人焊接圓弧件實驗系統(tǒng)使用。 操作機器人焊接工作站實訓(xùn)平臺能積累足夠的實戰(zhàn)經(jīng)驗嗎?漢吉龍機器人焊接工作站實訓(xùn)平臺加工
機器人焊接工作站實訓(xùn)平臺能為學(xué)員提供好的技術(shù)指導(dǎo)?新一代機器人焊接工作站實訓(xùn)平臺怎么做
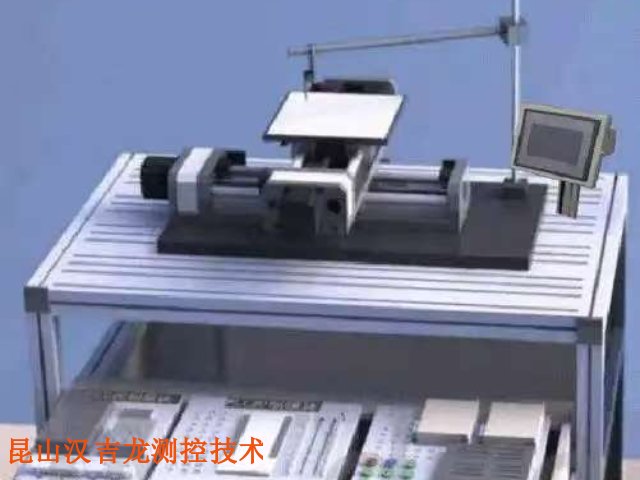
弧焊軌跡練習(xí)弧焊軌跡練習(xí)工作站由模擬焊接臺、模擬焊槍及電氣模塊等組成,可實現(xiàn)曲線、正方形、三角形、長方形等軌跡的模擬焊接。弧焊軌跡練習(xí)工作站可與工業(yè)機器人工作站通過機械連接機構(gòu)進行組合,并通過電氣模塊實現(xiàn)與工業(yè)機器人工作站操控部分迅速對接,實現(xiàn)機器人弧焊軌跡訓(xùn)練。5、實訓(xùn)內(nèi)容1)、機器人功能實訓(xùn)(1)機器人在工業(yè)領(lǐng)域中的應(yīng)用(2)機器人機械結(jié)構(gòu)及工作原理認知(3)機器人操控柜功能學(xué)習(xí)(4)機器人基本操控指令實訓(xùn)(5)編程操控機器人的簡單動作實訓(xùn)(6)編程操控機器人多軸聯(lián)動實訓(xùn)(7)機器人復(fù)雜運動編程指令實訓(xùn)①轉(zhuǎn)軸運動指令實訓(xùn)②輸入輸出群指令實訓(xùn)③輸入信號指令實訓(xùn)④通訊指令實訓(xùn)⑤程序流程指令實訓(xùn)⑥程序運行停止指令實訓(xùn)⑦速度操控指令實訓(xùn)⑧等待指令實訓(xùn)⑨賦值指令實訓(xùn)⑩負載定義指令實訓(xùn)2)、弧焊軌跡功能實訓(xùn)(1)機器人操控模擬焊槍進行方形軌跡運動實訓(xùn)(2)機器人操控模擬焊槍進行圓形軌跡運動實訓(xùn)(3)機器人操控模擬焊槍進行橢圓形軌跡運動實訓(xùn)(4)機器人操控模擬焊槍進行弧形軌跡運動實訓(xùn)(5)機器人操控模擬焊槍進行其它預(yù)設(shè)軌跡運動實訓(xùn)3)、安全光幕功能實訓(xùn)4)、PLC編程操控實訓(xùn)(1)PLC對碼垛單元編程操控實訓(xùn)。 新一代機器人焊接工作站實訓(xùn)平臺怎么做
與機器人焊接工作站實訓(xùn)平臺相關(guān)的文章

氣動系統(tǒng)機器人焊接工作站實訓(xùn)平臺
- 非標(biāo)型機器人焊接工作站實訓(xùn)平臺怎么樣 2025-02-22
- 電機機器人焊接工作站實訓(xùn)平臺連接 2025-02-22
- HOJOLO機器人焊接工作站實訓(xùn)平臺加工 2025-02-19
- 設(shè)備機器人焊接工作站實訓(xùn)平臺廠家 2025-02-16
- 新一代機器人焊接工作站實訓(xùn)平臺怎么做 2025-02-13
- 人機界面機器人焊接工作站實訓(xùn)平臺實驗 2025-02-10
- 實物機器人焊接工作站實訓(xùn)平臺怎么樣 2025-02-07
- 非標(biāo)型機器人焊接工作站實訓(xùn)平臺設(shè)備 2025-02-07
- VALENIAN機器人焊接工作站實訓(xùn)平臺加工 2025-02-06
- 共享機器人焊接工作站實訓(xùn)平臺工作原理 2025-02-05
- 教學(xué)機器人焊接工作站實訓(xùn)平臺公司 2025-02-05
- 氣路連接機器人焊接工作站實訓(xùn)平臺內(nèi)容 2025-01-27
與機器人焊接工作站實訓(xùn)平臺相關(guān)的產(chǎn)品

與機器人焊接工作站實訓(xùn)平臺相關(guān)的新聞
與機器人焊接工作站實訓(xùn)平臺相關(guān)的問題
與機器人焊接工作站實訓(xùn)平臺相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-
福建俄羅斯激光對中儀
2025-07-11 -

湖南設(shè)備激光對中儀
2025-07-11 -

瑞典激光對中儀器寫論文
2025-07-11 -

專業(yè)級激光對中儀器保養(yǎng)
2025-07-11 -

在線激光對中儀定制
2025-07-11 -

無錫激光對中儀怎么用
2025-07-11 -

國產(chǎn)激光對中儀器定做
2025-07-11 -

軸激光對中儀操作
2025-07-11 -
吉林旋轉(zhuǎn)機械激光對中儀
2025-07-11