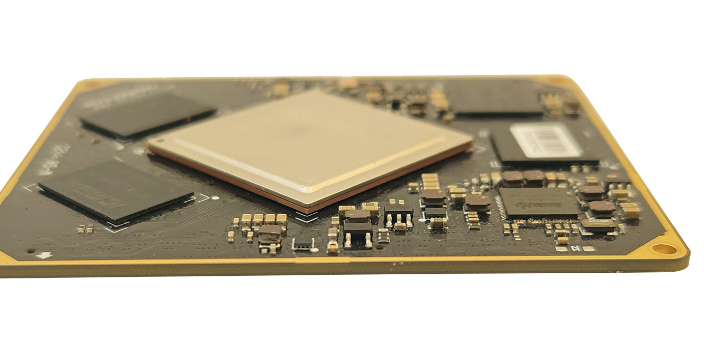
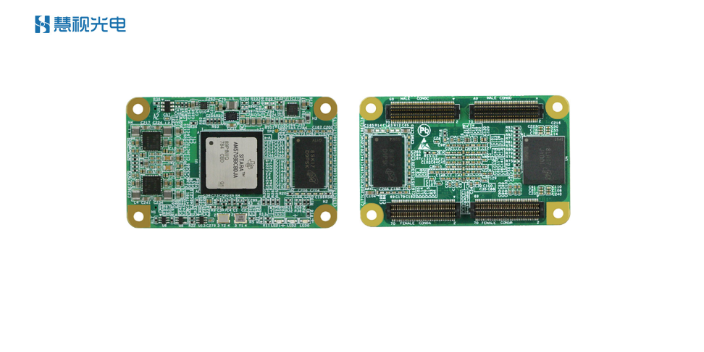
成都慧視開(kāi)發(fā)的各款式的AI圖像處理板,就是助力低空經(jīng)濟(jì)發(fā)展的傳感器技術(shù)設(shè)備之一。AI圖像處理板具備智能圖像檢測(cè)識(shí)別以及跟蹤的能力,在低空經(jīng)濟(jì)領(lǐng)域,能夠讓無(wú)人機(jī)實(shí)現(xiàn)智慧化賦能。成都慧視開(kāi)發(fā)的RK3588系列圖像處理板Viztra-HE030,具備6.0TOPS算力,是當(dāng)下國(guó)產(chǎn)圖像處理板的性能前列的產(chǎn)品...
目標(biāo)識(shí)別基本參數(shù)
- 品牌
- 慧視科技
- 型號(hào)
- 可咨詢
- 輸出信號(hào)
- 數(shù)字型,可定制
- 制作工藝
- 可定制,薄膜,陶瓷,集成
- 材質(zhì)
- 可定制
- 材料物理性質(zhì)
- 可定制,導(dǎo)體,磁性材料
- 材料晶體結(jié)構(gòu)
- 可定制
- 加工定制
- 是
目標(biāo)識(shí)別企業(yè)商機(jī)
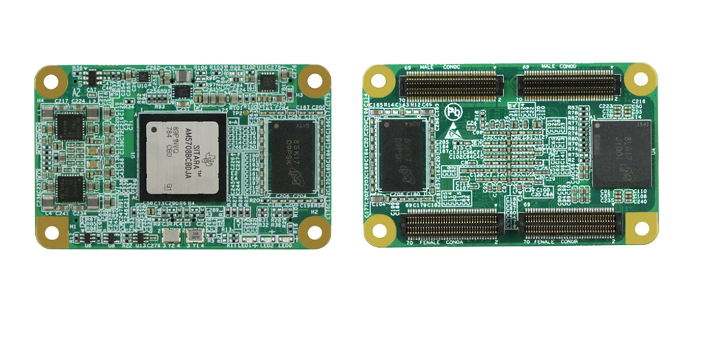
長(zhǎng)時(shí)間一直進(jìn)行這樣的圖像標(biāo)注工作,那無(wú)疑是枯燥而乏味的,手酸不說(shuō),更多的是精神上的折磨,進(jìn)而效率大打折扣。但這又是算法提升的必要途徑,無(wú)法跳過(guò),當(dāng)項(xiàng)目緊急時(shí),甚至需要多人加班加點(diǎn)趕進(jìn)度。這樣的痛苦現(xiàn)狀急需改變!慧視光電的算法工程師為了提高這一的效率,開(kāi)發(fā)了一個(gè)深度學(xué)習(xí)算法開(kāi)發(fā)平臺(tái)SpeedDP。它的基本邏輯是基于一個(gè)手動(dòng)標(biāo)注一定量的數(shù)據(jù)集進(jìn)行訓(xùn)練,形成一個(gè)可用的預(yù)選模型(如果已有模型可以直接使用),然后訓(xùn)練一定階段后,可以評(píng)估此模型的能力,如果能夠滿足使用就可以對(duì)相同目標(biāo)的新數(shù)據(jù)集(未進(jìn)行任何標(biāo)注)進(jìn)行AI自動(dòng)化標(biāo)注。這一過(guò)程的省去了大量需要對(duì)新數(shù)據(jù)集的手動(dòng)拉框工作,同時(shí)也在不斷反哺此模型算法,幫助提升性能。Viztra-LE034是采用RV1126開(kāi)發(fā)而成的AI識(shí)別模塊。天津視頻目標(biāo)識(shí)別工具
目標(biāo)識(shí)別
“啟明935A”系列芯片已經(jīng)成功點(diǎn)亮,并完成各項(xiàng)功能性測(cè)試,達(dá)到車規(guī)級(jí)量產(chǎn)標(biāo)準(zhǔn)。啟明935A是行業(yè)首顆基于Chiplet(芯粒/小芯片)異構(gòu)集成范式的自動(dòng)駕駛芯片,但并非單一芯片,而是一個(gè)家族系列。啟明935HUBChiplet可以和不同數(shù)量的大熊星座AIChiplet互相搭配,再結(jié)合靈活的封裝方式,快速形成不同性能等級(jí)的SoC芯片。它還支持高帶寬的PBLink多芯互連,雙芯雙向帶寬128GB/s,四芯雙向帶寬64GB/s。啟明935A每顆芯片都支持比較大20路的1080p60攝像頭輸入,可應(yīng)用于各類端側(cè)AI部署。得益于大熊星座NPU天然支持Transformer結(jié)構(gòu),初步支持的模型有Yolo系列、ResNet50、PSPNet、PointNet++、TrafficSign_Retinanet、BevDet、miniCPM、Unet_ResNet50、PointPillars、PillarNest、M2track、BevFusion、PaliGemma、LLaMa-3B、8B等等。河南視頻目標(biāo)識(shí)別情況如何提升無(wú)人設(shè)備的遠(yuǎn)程識(shí)別能力?
無(wú)人機(jī)的迅猛發(fā)展,使得無(wú)人機(jī)的反制技術(shù)也水漲船高,常見(jiàn)的有電子干擾、無(wú)人機(jī)識(shí)別對(duì)抗等方式。后者采用圖像識(shí)別技術(shù),通過(guò)在無(wú)人機(jī)攝像頭的基礎(chǔ)上加裝AI高性能圖像處理板,在算法的作用下,就具備無(wú)人機(jī)識(shí)別的功能,為無(wú)人機(jī)對(duì)抗創(chuàng)造條件。由于無(wú)人機(jī)飛行速度極快,因此針對(duì)于這樣環(huán)境下的AI識(shí)別需要“與眾不同”的圖像處理板。我們都知道,當(dāng)視頻幀率越高時(shí),視頻越能夠體現(xiàn)畫面細(xì)節(jié)信息,而圖像識(shí)別算法正是逐幀進(jìn)行識(shí)別,因此,攝像頭捕捉到的畫面細(xì)節(jié)越多,識(shí)別的精度就會(huì)越高。
利用無(wú)人機(jī)實(shí)現(xiàn)智能化識(shí)別能夠幫助我們提升許多工作效率,在很多行業(yè)都有應(yīng)用。像安防巡檢、交通管理等,飛在高空的無(wú)人機(jī)比傳統(tǒng)的地面巡邏更有視野,更能搜集掌握全局信息,再通過(guò)和地面巡邏的配合,能夠有效減少工作量。但是在無(wú)人機(jī)識(shí)別的過(guò)程中會(huì)遇到很多問(wèn)題,比如當(dāng)環(huán)境變得復(fù)雜時(shí),識(shí)別的精度可能就會(huì)受到影響。AI識(shí)別算法是一種深度學(xué)習(xí)的算法,它不是一成不變的,它也需要適應(yīng)不同的環(huán)境,因此對(duì)于AI算法的訓(xùn)練也必不可少。應(yīng)急無(wú)人機(jī)用AI圖像處理板選慧視光電。
目標(biāo)識(shí)別算法是一種深度學(xué)習(xí)算法,其聰明程度需要我們不斷訓(xùn)練,這就得益于大量的圖像標(biāo)注,通過(guò)對(duì)車輛行駛環(huán)境的數(shù)據(jù)集的大量標(biāo)注,能夠讓AI更加聰明,標(biāo)注得越多,識(shí)別的精度就可能越高。但是大量的圖像標(biāo)注跟工作顯然會(huì)耗費(fèi)大量的時(shí)間精力。而慧視SpeedDP的出現(xiàn)很好地解決了這個(gè)問(wèn)題。SpeedDP是一個(gè)深度學(xué)習(xí)AI算法訓(xùn)練開(kāi)發(fā)平臺(tái),他能夠通過(guò)現(xiàn)有的算法模型或者自訓(xùn)練一個(gè)算法模型,實(shí)現(xiàn)對(duì)新數(shù)據(jù)集的快速AI自動(dòng)標(biāo)注,以此反復(fù),幫助使用者提升算法性能。能夠有效節(jié)約大量的時(shí)間。哪家公司能夠快速集成開(kāi)發(fā)高性能的RK3588圖像處理板?上海流暢目標(biāo)識(shí)別創(chuàng)意
機(jī)器狼AI識(shí)別模塊定制。天津視頻目標(biāo)識(shí)別工具
eVTOL是指電動(dòng)垂直起降飛行器,大力開(kāi)展eVTOL試點(diǎn),是對(duì)低空經(jīng)濟(jì)的強(qiáng)動(dòng)力注入,而無(wú)人機(jī)正是這一領(lǐng)域的關(guān)鍵選擇之一。無(wú)人機(jī)在低空經(jīng)濟(jì)中扮演者重要角色,隨著應(yīng)用領(lǐng)域的不斷增多,未來(lái)無(wú)人機(jī)的數(shù)量將呈式增長(zhǎng),屆時(shí)eVTOL起降中心將聚集眾多各式各樣的無(wú)人機(jī),如何高效有序的讓無(wú)人機(jī)彼此工作而不互相干擾是行業(yè)值得思考的一件事。當(dāng)許多無(wú)人機(jī)需要同時(shí)起飛執(zhí)行不同的任務(wù)時(shí),如果操控不當(dāng),或者收到外力影響,就容易出現(xiàn)事故,而人為的反應(yīng)畢竟有延后,不可能做到完全的補(bǔ)救操作,因此無(wú)人機(jī)自身的規(guī)避措施建設(shè)一樣重要。天津視頻目標(biāo)識(shí)別工具
與目標(biāo)識(shí)別相關(guān)的文章
省時(shí)省力目標(biāo)識(shí)別鄭重承諾
- 天津視頻目標(biāo)識(shí)別工具 2025-07-15
- 海南智能化目標(biāo)識(shí)別開(kāi)發(fā) 2025-07-14
- 江蘇高性能目標(biāo)識(shí)別遠(yuǎn)程控制 2025-07-14
- 重慶安全目標(biāo)識(shí)別型號(hào) 2025-07-14
- 湖南無(wú)源目標(biāo)識(shí)別 2025-07-14
- 廣東低壓線目標(biāo)識(shí)別遠(yuǎn)程控制 2025-07-14
- 陜西國(guó)產(chǎn)化目標(biāo)識(shí)別系統(tǒng) 2025-07-14
- 陜西無(wú)源目標(biāo)識(shí)別售價(jià) 2025-07-14
- 廣東如何目標(biāo)識(shí)別辦公軟件 2025-07-14
- 重慶低壓線目標(biāo)識(shí)別工具 2025-07-14
- 貴州企業(yè)目標(biāo)識(shí)別遠(yuǎn)程協(xié)助 2025-07-14
- 安徽哪里有目標(biāo)識(shí)別售價(jià) 2025-07-14
與目標(biāo)識(shí)別相關(guān)的產(chǎn)品
與目標(biāo)識(shí)別相關(guān)的新聞
-
吉林移動(dòng)目標(biāo)識(shí)別解決方案 2025-07-13 04:01:53小興安嶺的日常巡護(hù),是構(gòu)筑東北生態(tài)安全的必要措施,進(jìn)入冬季,整個(gè)小興安嶺將處于冰雪覆蓋,按照傳統(tǒng)的巡檢模式,危險(xiǎn)且費(fèi)力。整個(gè)小興安嶺森林覆蓋率達(dá)到96%,只靠肉眼的觀察,很容易錯(cuò)過(guò)死角空白區(qū)的潛在危險(xiǎn),因此,無(wú)人機(jī)上線了。將無(wú)人機(jī)智能化,在吊艙的基礎(chǔ)上加裝具備智能圖像處理的板卡,再通過(guò)定制算法的植入...
-
江蘇目標(biāo)識(shí)別鄭重承諾 2025-07-13 16:01:40我國(guó)西部地區(qū)地形復(fù)雜、天氣多變,許多電網(wǎng)架設(shè)在高山流水之間,給電網(wǎng)的巡檢維護(hù)造成了不小的困難。于是,不同于傳統(tǒng)人工巡檢的智能化巡檢維護(hù)開(kāi)始逐步應(yīng)用。這種方式采用無(wú)人機(jī)加智能化機(jī)器人,其中無(wú)人機(jī)承擔(dān)巡檢工作,而智能化機(jī)器人進(jìn)行維護(hù),兩者互相配合。無(wú)人機(jī)搭載智能化吊艙,吊艙內(nèi)置圖像識(shí)別傳感器,工程師可以...
-
海南可靠目標(biāo)識(shí)別解決方案 2025-07-13 12:01:46“啟明935A”系列芯片已經(jīng)成功點(diǎn)亮,并完成各項(xiàng)功能性測(cè)試,達(dá)到車規(guī)級(jí)量產(chǎn)標(biāo)準(zhǔn)。啟明935A是行業(yè)首顆基于Chiplet(芯粒/小芯片)異構(gòu)集成范式的自動(dòng)駕駛芯片,但并非單一芯片,而是一個(gè)家族系列。啟明935HUBChiplet可以和不同數(shù)量的大熊星座AIChiplet互相搭配,再結(jié)合靈活的封裝方式...
-
湖北專業(yè)目標(biāo)識(shí)別編號(hào) 2025-07-13 13:01:49成都慧視開(kāi)發(fā)的RK3588系列高性能圖像處理板Viztra-HE030,能夠在-40℃~65℃的環(huán)境中進(jìn)行工作,用在寒冷的北方冬天電力巡檢領(lǐng)域,可以有效支撐無(wú)人機(jī)的穩(wěn)定工作。此外,這款板卡的存儲(chǔ)溫度范圍在-55℃~75℃,遇到更加極端寒冷的天氣時(shí),不使用也能夠有效抗寒。RK3588屬于旗艦機(jī)芯片,搭...
與目標(biāo)識(shí)別相關(guān)的問(wèn)題
與目標(biāo)識(shí)別相關(guān)的標(biāo)簽
新聞資訊
產(chǎn)品推薦
-

甘肅視頻識(shí)別AI智能服務(wù)平臺(tái)
2025-07-14 -

貴州企業(yè)目標(biāo)識(shí)別遠(yuǎn)程協(xié)助
2025-07-14 -

安徽哪里有目標(biāo)識(shí)別售價(jià)
2025-07-14 -
河南高性能目標(biāo)識(shí)別辦公平臺(tái)
2025-07-14 -
湖南穩(wěn)定目標(biāo)識(shí)別辦公軟件
2025-07-14 -
江西國(guó)產(chǎn)目標(biāo)識(shí)別
2025-07-14 -
安徽省時(shí)省力目標(biāo)識(shí)別遠(yuǎn)程控制
2025-07-14 -

流暢圖像處理板什么價(jià)格
2025-07-13 -
浙江圖像處理板技術(shù)含量
2025-07-13