MEMS傳感器的主要應(yīng)用領(lǐng)域有哪些?
消費(fèi)電子產(chǎn)品在MEMSDrive出現(xiàn)之前,手機(jī)攝像頭主要由音圈馬達(dá)移動(dòng)鏡頭組的方式實(shí)現(xiàn)防抖(簡(jiǎn)稱鏡頭防抖技術(shù)),受到很大的局限。而另一個(gè)在市場(chǎng)上較好的防抖技術(shù):多軸防抖,則是利用移動(dòng)圖像傳感器(ImageSensor)補(bǔ)償抖動(dòng),但由于這個(gè)技術(shù)體積龐大、耗電量超出手機(jī)載荷,一直無(wú)法在手機(jī)上應(yīng)用。憑著微機(jī)電在體積和功耗上的突破,新的技術(shù)MEMSDrive類似一張貼在圖像傳感器背面的平面馬達(dá),帶動(dòng)圖像傳感器在三個(gè)旋轉(zhuǎn)軸移動(dòng)。MEMSDrive的防抖技術(shù)是透過(guò)陀螺儀感知拍照過(guò)程中的瞬間抖動(dòng),依靠精密算法,計(jì)算出馬達(dá)應(yīng)做的移動(dòng)幅度并做出快速補(bǔ)償。這一系列動(dòng)作都要在百分之一秒內(nèi)做完,你得到的圖像才不會(huì)因?yàn)槎秳?dòng)模糊掉。
MEMS的柔性電極是什么?新型MEMS微納米加工的傳感器
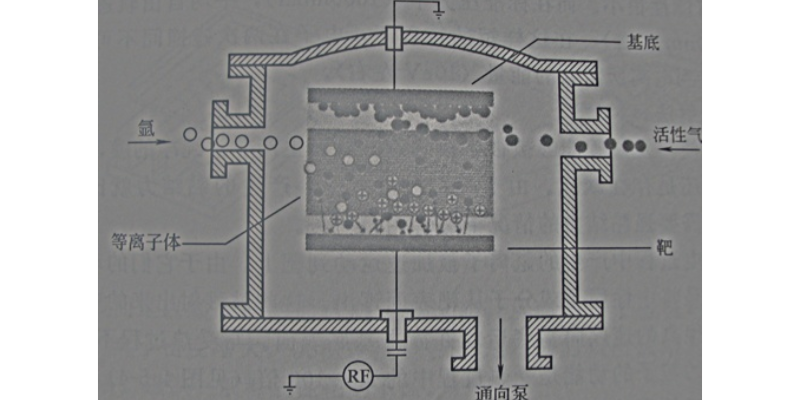
駕駛輔助系統(tǒng)升級(jí)帶動(dòng)MEMS&傳感器價(jià)值提升。自動(dòng)駕駛已成大趨勢(shì),環(huán)境信息的感知是實(shí)現(xiàn)自動(dòng)駕駛的基礎(chǔ),越高級(jí)別的自動(dòng)駕駛對(duì)信息感知能力的需求越高,對(duì)應(yīng)的MEMS&傳感器用量和價(jià)值量也會(huì)相應(yīng)提升。根據(jù)NXP和Strategy analysis的數(shù)據(jù),L1/2級(jí)別的自動(dòng)駕駛只需要1個(gè)攝像頭模組、1-3個(gè)超聲波雷達(dá)和激光雷達(dá),以及0-1個(gè)融合傳感器,新增半導(dǎo)體價(jià)值在100-350美元,而至L4/5級(jí)別自動(dòng)駕駛車輛將會(huì)引入7-13個(gè)超聲波雷達(dá)和激光雷達(dá)、6-8個(gè)攝像頭模組并會(huì)引入V2X模塊以及多傳感器融合方案,新增半導(dǎo)體價(jià)值在1000美元以上。另外,短期來(lái)看,現(xiàn)實(shí)條件暴露了ADAS的缺陷,導(dǎo)致了一些安全事故的發(fā)生,由此對(duì)ADAS系統(tǒng)的安全性需求猛增,這些缺點(diǎn)重新致力于改進(jìn)LIDAR、RADAR和其他成像設(shè)備,將多面?zhèn)鞲衅飨到y(tǒng)集成到自動(dòng)駕駛汽車中。青海MEMS微納米加工MEMS技術(shù)常用工藝技術(shù)組合有:紫外光刻、電子束光刻EBL、PVD磁控濺射、IBE刻蝕、ICP-RIE深刻蝕。
MEMS制作工藝-聲表面波器件SAW:
聲表面波是一種沿物體表面?zhèn)鞑サ膹椥圆ǎ軌蛟诩孀鱾髀暯橘|(zhì)和電聲換能材料的壓電基底材料表面進(jìn)行傳播。它是聲學(xué)和電子學(xué)相結(jié)合的一門(mén)邊緣學(xué)科。由于聲表面波的傳播速度比電磁波慢十萬(wàn)倍,而且在它的傳播路徑上容易取樣和進(jìn)行處理。因此,用聲表面波去模擬電子學(xué)的各種功能,能使電子器件實(shí)現(xiàn)超小型化和多功能化。隨著微機(jī)電系統(tǒng)(MEMS)技術(shù)的發(fā)展進(jìn)步,聲表面波研究向諸多領(lǐng)域進(jìn)行延伸研究。上世紀(jì)90年代,已經(jīng)實(shí)現(xiàn)了利用聲表面波驅(qū)動(dòng)固體。進(jìn)入二十一世紀(jì),聲表面波SAW在微流體應(yīng)用研究取得了巨大的發(fā)展。應(yīng)用聲表面波器件可以實(shí)現(xiàn)固體驅(qū)動(dòng)、液滴驅(qū)動(dòng)、微加熱、微粒集聚\混合、霧化。
加速度傳感器是很早廣泛應(yīng)用的MEMS之一。MEMS,作為一個(gè)機(jī)械結(jié)構(gòu)為主的技術(shù),可以通過(guò)設(shè)計(jì)使一個(gè)部件(圖中橙色部件)相對(duì)底座substrate產(chǎn)生位移(這也是絕大部分MEMS的工作原理),這個(gè)部件稱為質(zhì)量塊(proofmass)。質(zhì)量塊通過(guò)錨anchor,鉸鏈hinge,或彈簧spring與底座連接。鉸鏈或懸臂梁部分固定在底座。當(dāng)感應(yīng)到加速度時(shí),質(zhì)量塊相對(duì)底座產(chǎn)生位移。通過(guò)一些換能技術(shù)可以將位移轉(zhuǎn)換為電能,如果采用電容式傳感結(jié)構(gòu)(電容的大小受到兩極板重疊面積或間距影響),電容大小的變化可以產(chǎn)生電流信號(hào)供其信號(hào)處理單元采樣。通過(guò)梳齒結(jié)構(gòu)可以極大地?cái)U(kuò)大傳感面積,提高測(cè)量精度,降低信號(hào)處理難度。加速度計(jì)還可以通過(guò)壓阻式、力平衡式和諧振式等方式實(shí)現(xiàn)。MEMS的研究?jī)?nèi)容與方向是什么?
MEMS繼電器與開(kāi)關(guān)。其優(yōu)勢(shì)是體積小(密度高,采用微工藝批量制造從而降低成本),速度快,有望取代帶部分傳統(tǒng)電磁式繼電器,并且可以直接與集成電路IC集成,極大地提高產(chǎn)品可靠性。其尺寸微小,接近于固態(tài)開(kāi)關(guān),而電路通斷采用與機(jī)械接觸(也有部分產(chǎn)品采用其他通斷方式),其優(yōu)勢(shì)劣勢(shì)基本上介于固態(tài)開(kāi)關(guān)與傳統(tǒng)機(jī)械開(kāi)關(guān)之間。MEMS繼電器與開(kāi)關(guān)一般含有一個(gè)可移動(dòng)懸臂梁,主要采用靜電致動(dòng)原理,當(dāng)提高觸點(diǎn)兩端電壓時(shí),吸引力增加,引起懸臂梁向另一個(gè)觸電移動(dòng),當(dāng)移動(dòng)至總行程的1/3時(shí),開(kāi)關(guān)將自動(dòng)吸合(稱之為pullin現(xiàn)象)。pullin現(xiàn)象在宏觀世界同樣存在,但是通過(guò)計(jì)算可以得知所需的閾值電壓高得離譜,所以我們?nèi)粘V袔缀醪粫?huì)看到。基于MEMS技術(shù)的SAW器件是什么?山西MEMS微納米加工的技術(shù)服務(wù)
MEMS具有以下幾個(gè)基本特點(diǎn)?新型MEMS微納米加工的傳感器
MEMS制作工藝-聲表面波器件的特點(diǎn):
3.由于聲表面波器件是在單晶材料上用半導(dǎo)體平面工藝制作的,所以它具有很好的一致性和重復(fù)性,易于大量生產(chǎn),而且當(dāng)使用某些單晶材料或復(fù)合材料時(shí),聲表面波器件具有極高的溫度穩(wěn)定性。
4.聲表面波器件的抗輻射能力強(qiáng),動(dòng)態(tài)范圍很大,可達(dá)100dB。這是因?yàn)樗玫氖蔷w表面的彈性波而不涉及電子的遷移過(guò)程
此外,在很多情況下,聲表面波器件的性能還遠(yuǎn)遠(yuǎn)超過(guò)了很好的電磁波器件所能達(dá)到的水平。比如用聲表面波可以作成時(shí)間-帶寬乘積大于五千的脈沖壓縮濾波器,在UHF頻段內(nèi)可以作成Q 值超過(guò)五萬(wàn)的諧振腔,以及可以作成帶外抑制達(dá)70dB 、頻率達(dá)1 低Hz 的帶通濾波器
新型MEMS微納米加工的傳感器