國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人;2015:基于多驅動單元同步控制的重載搬運機器人;2016:面向太陽能光熱發電場的鏡面清洗機器人;2017:基于測量式激光導航的叉式搬運機器人物流系統;2020:SUNBOT子母式跨陣列作業光伏清潔機器人;碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔.光伏有三種清潔方式:人工清潔、水車清潔和機器人清潔。寧夏光伏智能清掃機器人

國自機器人獲評首臺(套)項目一覽,2014年變電站KYN開關柜智能操控機器人;2015年基于多驅動單元同步控制的重載搬運機器人;2016年面向太陽能光熱發電場的鏡面清洗機器人;2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔!遼寧智能清掃機器人品牌衛生安全方面,機器人的運行不需要人工干預,避免了人工清潔過程中可能產生的傷害和污染風險。

搜集資料進行光伏板清掃機器人發展前景預測必須占有充分的資料。有了充分的資料,才能為光伏板清掃機器人發展前景預測提供進行分析、判斷的可靠依據。在光伏板清掃機器人發展前景預測計劃的指導下,調查和搜集預測有關資料是進行光伏板清掃機器人發展前景預測的重要一環,也是預測的基礎性工作。3、選擇方法根據預測的目標以及各種預測方法的適用條件,選擇出合適的預測方法。有時可以運用多種預測方法來預測同一目標。預測方法的選用是否恰當,將直接影響到預測的精確性和可靠性。運用光伏板清掃機器人發展前景預測方法的**是建立描述、概括研究對象特征和變化規律的模型,根據模型進行計算或者處理,即可得到預測結果。
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人;2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作業光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放。根據不同的光伏電站特性,配置相應的機器人組合,靈活高效的實現光伏電站的無人化清潔.我們可根據您的需求,為您量身定制光伏智能清掃機器人,滿足您的個性化需求。

智能化運維管理:光伏清掃機器人不僅可以進行清潔工作,還可以通過智能化運維管理,提高電站的運行效率和安全性。例如:機器人可以通過傳感器和算法,實時監測光伏板的運行狀態和環境變化,及時發現并處理問題,提高電站的可靠性和安全性。綜上所述,光伏清掃機器人的應用場景非常的廣闊,可以在各種環境下進行清潔工作,提高電站的運行效率和安全性。隨著技術的不斷進步和市場的不斷擴大,光伏清掃機器人的應用前景也將更加廣闊。智能算法的運用能使它規劃清掃路線,提高清掃的效率。遼寧智能清洗機器人費用
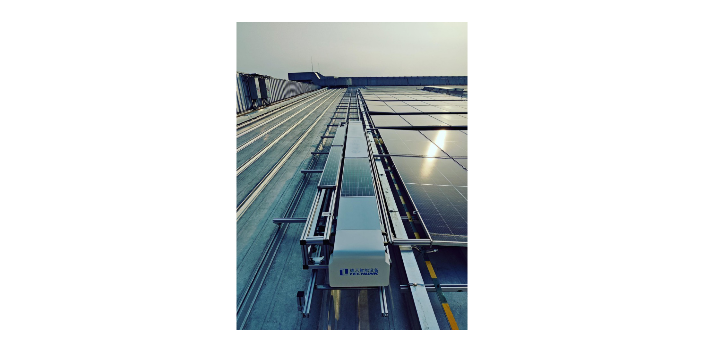
光伏有三種清潔方式:人工清潔、水車清潔和機器人清潔。寧夏光伏智能清掃機器人
做好光伏板清掃機器人發展前景預測,需把握預測的四個基本要素:1、信息。信息是客觀事物特性和變化的表征和反映,存在于各類載體,是光伏板清掃機器人預測的主要工作對象、工作基礎和成果反映。2、方法。方法是指在預測的過程中進行質和量的分析時所采用的各種手段。預測的方法按照不同的標準可以分成不同的類別。按照光伏板清掃機器人預測結果屬性可以分為定性預測和定量預測,按照預測時間長短的不同,可以分為長期預測、中期預測和短期預測。按照方法本身,更可以分成眾多的類別,**基本的是模型預測和非模型預測。
寧夏光伏智能清掃機器人